Day 246: The Kalman filter

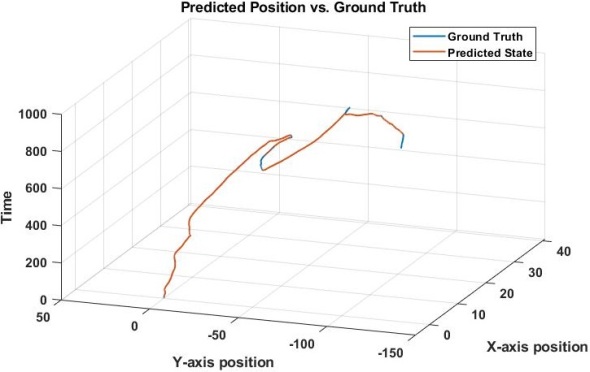
This is just one application for the Kalman filter, I estimated a two dimensional position using a random walk model. We have 3-dimensions here even though it is a 2 dimensional problem, the third dimension is time. This way we can see the path over the course of the recorded time. Notice there are no units, becuase in this case we were working with synthetic data so the units were meaningless and I did not include them.
Since we’ve been talking a lot about it, I thought it might be a good idea to formally introduce the Kalman filter. This will be a semi-high level introduction (like my knowing your spinal cord series), but at the end of it you should have a relatively good feel for what a Kalman filter is.
(more…)


