Iteration engineering

Well yesterday, after four long years, I got to open up about the robot I built and it made me realize just how many design changes I went through to get the final product. Technically it’s not even the “final” product, it’s just where I stopped and the next person took over. There’s still a lot of work left to be done with the design, but looking through all the photos of the process, I realized just how much work that robot really was.
In engineering it isn’t always a measure twice, cut once mentality. Sometimes when you’re building something, unforeseen things go wrong, or you realize there’s a better way. It’s not like designing a bridge or a building where you get one shot at doing it right, although to be fair, I’m sure construction plans change during the actual building phase. From an engineering standpoint though, there’s only so many simulations or equations you can check before you just have to build the thing.
For my robot, we couldn’t run all the simulations needed because that would’ve been a whole lot of work when we could just build and check. Now to be fair I did run several simulations, but a lot of the components behave in non-linear ways that are hard to model. Additionally, modeling 3D printed parts is never an easy task since parts are inherently anisotropic, meaning they are stronger in one direction (90 degrees to the direction of print) than the other.
While I did quite a bit of math to get to the solution I did, specifically with the knee, I was always surprised at some of the unforeseen issues I had. Things that I wouldn’t have even thought of turned out to be an issue once I had a physical copy to play with. A good example, again using my knee design, would be from the third iteration.
I broadly break up the robot designs into major iterations and minor. Major iterations are complete overhauls of the design, for whatever reason. The knee went through three major iterations, the hip and foot two, and the rotation mechanism for the knee, three. Minor iterations are changes to the design to overcome unforeseen issues or I just was bored and found a better solution, because what else would I do with my time? The knee by far had the most, I believe there were almost a dozen minor iterations, while the hip only had three, and the foot had two.
The point being, there were a lot of changes and from discussions with my former PI, the robot is still undergoing changes, mostly to lock certain degrees of freedom so they can study how it behaves using a simplified model and because 3D printed parts have that whole anisotropic behavior about them I just mentioned (it’s a pain). Since yesterday’s post was VERY long, I didn’t get to talk about the path to the final design, but I did hint at it. The image below for example highlights five of the changes to the knee design and in particular I think it’s important to talk about the change from the third (middle) to the fourth (counting from the left), because while they look similar, you’ll notice the “tail” that exists in that version and the “final” which is furthest left.

You’ll notice that the path changes quite a bit as well, I got better at estimating the curved path the four bar linkage would take, the end design (far right) provided a large contact surface for the full range of motion. It’s a work of art if I do say so myself. I’m getting ahead of myself though, we should talk about the middle design, the one without the “tail.”
The story goes simply like this, the proof of concept design was crappy, but demonstrated that I could do what I was claiming to my PI. Going from the iterations shown above, the second design (second from the right) used the same linkage size, but the third iteration was when I realized I could almost double the linkage size making the knee extra beefy, which is what I wanted to end up with, a bulletproof knee design. However, there was an unforeseen problem.
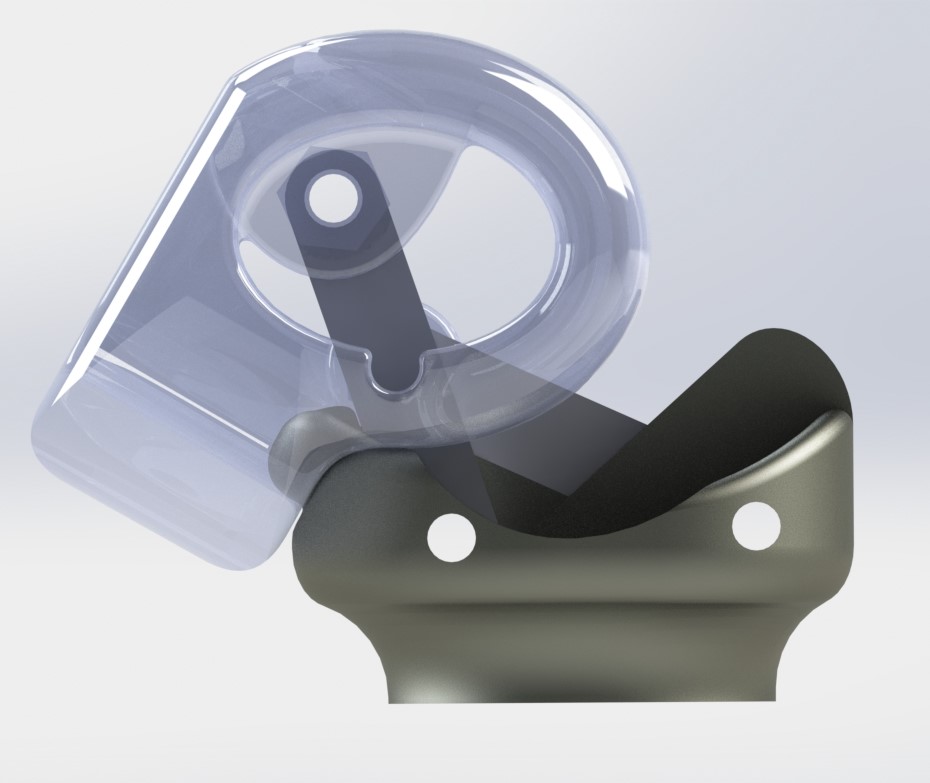
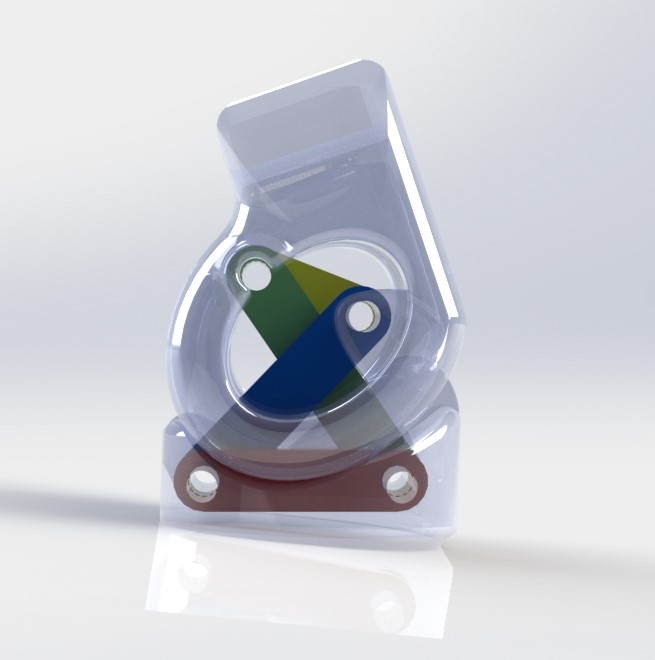
The photo above (left) was the first revision I made where I added what I’m calling the “tail to the tibial contact surface. When the knee was in the fully flexed position you see above, the center of rotation was in line with the yellow link, which doesn’t “really” exist, I added it for demonstration purposes, but the yellow link is a valid representation of the knee. This is a HUGE problem and I had done my job too well. The center of rotation couldn’t go any further back and because it was aligned directly with the blue and yellow links if I applied an out of plane force (from the side) the knee twisted badly!
It was a bit surprising and this instability bothered the crap out of me. I didn’t spend all this time designing this thing for this to happen, but since there was only a single instance where this occurred (fully flexed), the obvious fix was the tail. Thus when the knee is fully flexed, it literally locks in place with that tail so the load does not go through the pin joints anymore. When the knee is anywhere else, the center portions (you can somewhat see above) help provide an alternative path for out of plane forces (as in not going through the pin joints).
And that was a somewhat major “minor” iteration change that I had to address as I went through the design process with this knee. It was also an issue that I didn’t realize was an issue until we tested the 3D printed version. The simulations didn’t hint at this at all, so it was a bit of a shock when I came across the problem.
Since I didn’t get to talk about it yesterday either, I should also point out I keep saying I went through three major iterations with the knee, but yesterday I only showed two, the one you see above and the aluminum version, but there was a third! I don’t talk about it because it was very similar to the second iteration, but this was when I convinced my PI to purchase a special 3D printer that would produce very strong (still anisotropic) parts.

This version was mostly just modified to be printed instead of machined. I had to make the linkages extra large for this, almost comically large now that I look at it. The contact surfaces of the knee (femur portion or the top part) are removable so you can replace them as they wear. It was a better design, but it turns out the four bar linkage really is the better solution. And below you can see them all lined up for comparison.



Needless to say, there was a lot of work that went into the design I ended on. There were several major failures and some minor. I like telling this story because it’s a good reminder that your first idea isn’t always the best idea. It’s also important to show the path traveled because I think people tend to imagine the perfect design just popped out of my head one day and boom I built a robot. Up until yesterday this story was limited to the outreach I was doing, so I’m glad I get to talk about it here.
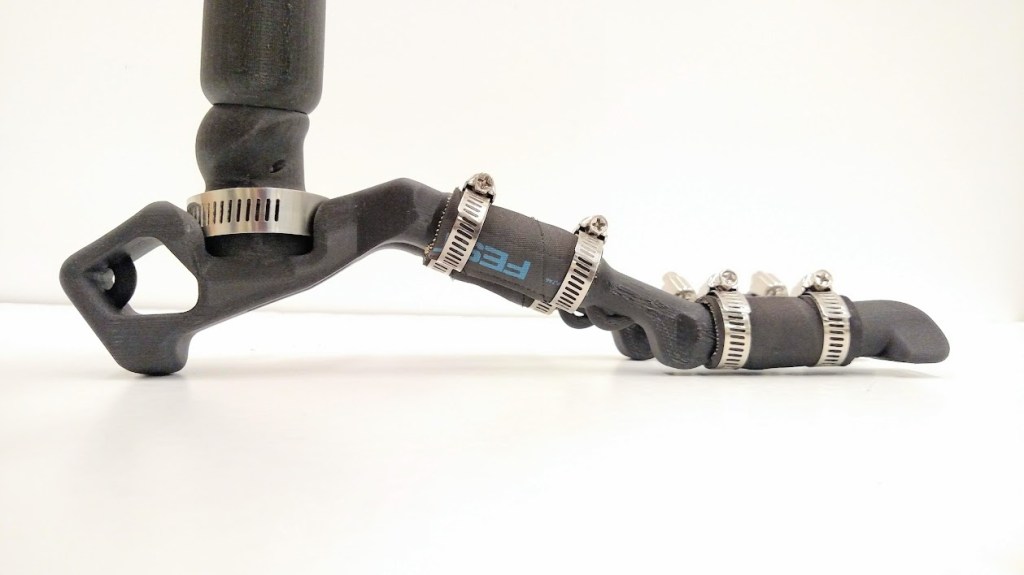
The foot went through two large changes, the first was bad, I’m not even sure what I was thinking when I came up with it. It was just the first design I could think of I guess, this was prior to realizing I could use the festo air muscles to create synovial joints, which IMO is a much better design and it stores energy as the robot walks, which is important. Bonus fact, in the photo on the right you can see a small hole, there were two holes (one on the opposite side) that fed tunnels that run through the foot to inflate each of the smaller joints, so you only need to add air to the ankle and the rest inflate. This linked the foot kinematically, meaning as the toes started to curl the ankle pressure increased (since the air is being compressed), making it a very complex system, but again I think it was for the better. Sometimes you need a little randomness to make the system perform more like a human and less stiff like a… well like a robot.

I’m sure this won’t be the final word on my robot, but I do hope that this helps remind others that the end product and the first design can be two very different things. On a somewhat personal note, I’ve wanted to build robots since I was like five, I mean who doesn’t, right? I literally told everyone I was building robots, mostly out of popsicle sticks, lol. So this was one of those moments where I was glad I grew up to be a big kid.




You caught the robot bug even earlier than I did! I had an early affinity for computers (I’ll tell you that story sometime), but I don’t think robot interest started for me until I was at least ten. One day there was a string of Twilight Zone episodes on TV. Only some of those have robots, but those were the ones that stood out to me. Struck by fascination, I later went to my room and made a vaguely quadrupedal object from – pony beads, of all things. (Are you familiar with pony bead creatures? Yeah. I don’t think they’re very good robot hardware.) But I knew before I even started that I had no way to animate it; it was just an expression of yearning.
We’re doing a lot better now, you and me both.
And it is helpful to see somebody else having to try multiple design iterations and feel their way through things, even in a professional research context. It certainly happens to me, and I always feel very slow and bemoan the waste of time and material.
LikeLiked by 1 person
April 29, 2022 at 2:23 am
HAHA! I had to google pony beads, but I can see why that may be problematic for robot building. I’m not sure where my robot fascination came from honestly. Probably all the cartoons or Sci-Fi movies.
It’s funny because your quadruped knee posts really inspired this post. It was basically a full year of designing, testing, redesigning, retesting, etc. before I got something that worked well and that was just for the knee!
LikeLiked by 1 person
April 29, 2022 at 1:58 pm
Did you have some favorite shows or movies, growing up? I don’t think I even got a lot of sci-fi exposure until I was 10+ years old.
LikeLiked by 1 person
April 29, 2022 at 3:02 pm
You know, I really enjoyed terminator as a kid (both 1 and 2), that probably says a lot about me haha. That’s probably where my fascination with robots came from, even if it was a cautionary tale…. oops. I grew up with a lot of the (now) classics from that time, Aliens, the blob (the 80’s remake, although the original is fun too and the theme song is super catchy), the fly (again 80’s remake), things like that.
What did you grow up with?
LikeLiked by 1 person
April 30, 2022 at 2:50 pm
As a really young kid, I mostly got to watch things in the “fairy tale” and “talking animals” vein – Disney movies and similar – plus wholesome edutainment like Mr. Rogers. Once I was a bit older and started getting some science fiction in my diet, The Twilight Zone and Star Trek (all the different series) became my primary favorites. Some other things that I only saw once, but that really stuck in my memory, included a production of The Martian Chronicles and the 1984 version of Dune.
And Star Wars was in there … eventually. Movie viewing at my house was pretty limited and random. After watching the news for hours, my dad would start aimlessly channel-surfing, and if he landed on something he liked, we’d get to watch the second half of it. So I saw pieces of the original Star Wars trilogy as a youngster, but I think I was a teenager before I actually got to sit down and watch the whole thing. The three prequels started coming out while I was a teen; I got to see the first two at other people’s houses, and actually saw the third one in a theater.
A lot of the classics that “everybody” has seen, I never saw. I am a little ashamed to admit that all the Terminator movies are among those. (Someday I’ll get to them!) I finally watched the original Blade Runner and Matrix films just a few months ago.
LikeLiked by 1 person
April 30, 2022 at 4:37 pm
Wait, wait, you only recently saw the Matrix films?! Wow… I’m seeing you in a whole different light now, haha. Seriously though, those were like mega depression balm for me. I just really liked the idea that the system (government in the real world case) was in place to keep us down.
I loved Star Trek growing up too, it’s a shame Shatner is a huge asshole. The Twilight Zone is awesome and I especially enjoyed The Outer Limits, probably because they made new seasons throughout the 90’s which (at the time!) felt so realistic and high tech.
I had a lot of screen time growing up. It was that whole parented by the TV kind of thing and consequently there was a lot of time to explore different genres and series.
LikeLiked by 1 person
May 1, 2022 at 10:22 am